Balancing yaw with different sized props?
17 posts
• Page 1 of 2 • 1, 2
Balancing yaw with different sized props?
![]() by epyonxero » Thu Jan 09, 2014 9:34 pm
by epyonxero » Thu Jan 09, 2014 9:34 pm
Im ruinning a Y6 with 10" props on the top motors and 11" props on the bottom and Im wonding if anyone else has experience with missmatched props and balancing yaw output. Right now Im using a 10% reduction in the yaw mixer on the motors with the larger props to try and balance the yaw output but Im not sure its working.
- epyonxero
- Posts: 193
- Joined: Thu Aug 30, 2012 4:09 pm
Re: Balancing yaw with different sized props?
![]() by Max » Thu Jan 09, 2014 10:33 pm
by Max » Thu Jan 09, 2014 10:33 pm
Do you have the directions switched on the rear motor, like in the recent QGC releases? Top front two CW and rear CCW?
Also are you running different pitches as well?
Maybe you could post your .mix file and a log plot screenshot of your MOT_YAW?
-Max
Also are you running different pitches as well?
Maybe you could post your .mix file and a log plot screenshot of your MOT_YAW?
-Max
- Max
- Posts: 2814
- Joined: Mon Aug 13, 2012 9:45 pm
- Location: Near Ithaca, NY, USA
Re: Balancing yaw with different sized props?
![]() by SuperSharpShooter » Fri Jan 10, 2014 6:10 am
by SuperSharpShooter » Fri Jan 10, 2014 6:10 am
I had yaw problems with my y6 running different props top and bottom. I ended up just switching to a flat hexa...
-Glenn
- SuperSharpShooter
- Posts: 276
- Joined: Sat Jan 12, 2013 9:44 pm
Re: Balancing yaw with different sized props?
![]() by epyonxero » Thu Jan 16, 2014 11:04 pm
by epyonxero » Thu Jan 16, 2014 11:04 pm
- Attachments
-
- Motor Mix
-
- MOT_YAW
- epyonxero
- Posts: 193
- Joined: Thu Aug 30, 2012 4:09 pm
Re: Balancing yaw with different sized props?
![]() by kinderkram » Thu Jan 16, 2014 11:37 pm
by kinderkram » Thu Jan 16, 2014 11:37 pm
Why don´t you just use the same size of props for both top and bottom?
You´re creating an imbalance and try to fight it with another imbalance.
Doesn´t make much sense to me...
You´re creating an imbalance and try to fight it with another imbalance.
Doesn´t make much sense to me...
- kinderkram
- Posts: 2911
- Joined: Fri Jun 22, 2012 7:47 am
Re: Balancing yaw with different sized props?
![]() by axelnied » Thu Jan 16, 2014 11:52 pm
by axelnied » Thu Jan 16, 2014 11:52 pm
- axelnied
- Posts: 262
- Joined: Wed Jul 04, 2012 5:51 pm
- Location: San Diego, CA, USA
Re: Balancing yaw with different sized props?
![]() by Max » Fri Jan 17, 2014 12:04 am
by Max » Fri Jan 17, 2014 12:04 am
Yikes, that's pretty far off. Yea would be curious what the default mix does since it would give more "positive" yaw control overall.
What brand props did you manage to find in the right configs like that?
Norbert, the theory of bigger props on bottom is to help recoup some of the efficiency losses from having a coax setup. The top prop compresses the air into a cone, so less air than possible is hitting the lower prop. By making the lower prop a bit bigger, you give it more air to bite into. At least that's the theory.
-Max
What brand props did you manage to find in the right configs like that?
Norbert, the theory of bigger props on bottom is to help recoup some of the efficiency losses from having a coax setup. The top prop compresses the air into a cone, so less air than possible is hitting the lower prop. By making the lower prop a bit bigger, you give it more air to bite into. At least that's the theory.
-Max
- Max
- Posts: 2814
- Joined: Mon Aug 13, 2012 9:45 pm
- Location: Near Ithaca, NY, USA
Re: Balancing yaw with different sized props?
![]() by axelnied » Fri Jan 17, 2014 6:50 am
by axelnied » Fri Jan 17, 2014 6:50 am
Could you please clarify the mixing table? How are your motors layed out? Did you use the convention illustrated here:
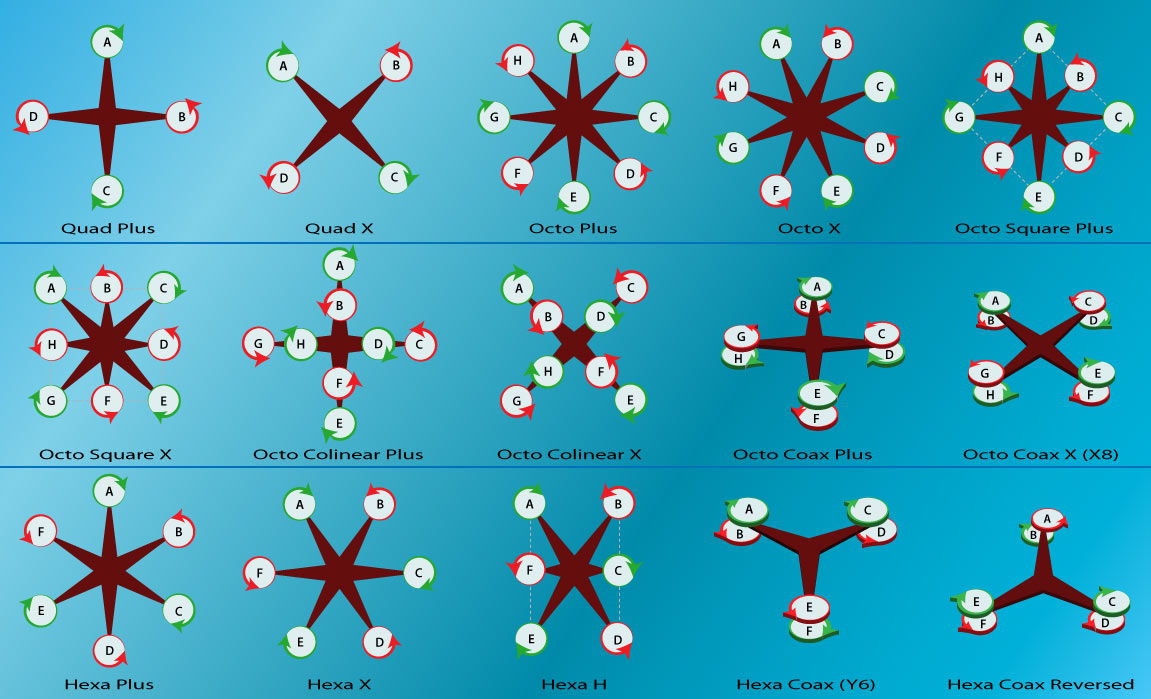
I assume Y6, right...?
If so, then why do E and F contribute to the roll? That makes no sense... There are obviously a few other things not adding up as well.
I assume Y6, right...?
If so, then why do E and F contribute to the roll? That makes no sense... There are obviously a few other things not adding up as well.
- axelnied
- Posts: 262
- Joined: Wed Jul 04, 2012 5:51 pm
- Location: San Diego, CA, USA
Re: Balancing yaw with different sized props?
![]() by 13brv3 » Fri Jan 17, 2014 3:19 pm
by 13brv3 » Fri Jan 17, 2014 3:19 pm
Yaw is an opposite reaction to the work a prop is doing to accelerate the air. The coaxial yaw imbalance comes from the fact that the bottom props don't usually do as much work as the top props, so the goal would be to make the top and bottom props do the same amount of work. There are a few ways to do this.
First, the yaw parameter is not really what you need to change, so I'd put those back to 100.
The top prop takes air that's essentially stationary, and accelerates it. This is just like any normal multirotor prop, so nothing special about this. Now consider the bottom prop. I has fast moving air above it from the top prop, so to do any work, it has to accelerate that air to a faster speed than the top prop did. Obviously, if it's turning the same RPM as the top prop, it will just be coasting along, and not really doing much work, so most of the thrust and yaw will be coming from the top motors.
The goal will be to make the bottom prop work as hard as the top one. If you're using the same props on top and bottom, you can simply turn the bottom prop faster. This can be done by using slightly higher KV motors on the bottom, or you can set the thrust parameter in the mixer table to a higher value for the bottom motor than the top motors.
The other way to equalize the work is to increase the prop size, but pitch is far more important than diameter for this. I personally like to keep the same diameter, then increase the pitch of the bottom prop. Unfortunately, the selection of counter-rotating props is not good enough to allow a lot of options for this. Increasing the diameter would work, but only if you go up significantly in size, and with no less pitch. I would bet that you're current prop selection is doing more harm than good, and you'd be better off just using the same props.
Hopefully some of that was coherent, since I'm still low on caffeine this morning.
Cheers,
Rusty
First, the yaw parameter is not really what you need to change, so I'd put those back to 100.
The top prop takes air that's essentially stationary, and accelerates it. This is just like any normal multirotor prop, so nothing special about this. Now consider the bottom prop. I has fast moving air above it from the top prop, so to do any work, it has to accelerate that air to a faster speed than the top prop did. Obviously, if it's turning the same RPM as the top prop, it will just be coasting along, and not really doing much work, so most of the thrust and yaw will be coming from the top motors.
The goal will be to make the bottom prop work as hard as the top one. If you're using the same props on top and bottom, you can simply turn the bottom prop faster. This can be done by using slightly higher KV motors on the bottom, or you can set the thrust parameter in the mixer table to a higher value for the bottom motor than the top motors.
The other way to equalize the work is to increase the prop size, but pitch is far more important than diameter for this. I personally like to keep the same diameter, then increase the pitch of the bottom prop. Unfortunately, the selection of counter-rotating props is not good enough to allow a lot of options for this. Increasing the diameter would work, but only if you go up significantly in size, and with no less pitch. I would bet that you're current prop selection is doing more harm than good, and you'd be better off just using the same props.
Hopefully some of that was coherent, since I'm still low on caffeine this morning.
Cheers,
Rusty
- 13brv3
- Posts: 152
- Joined: Wed Oct 24, 2012 1:10 pm
Re: Balancing yaw with different sized props?
![]() by epyonxero » Fri Jan 17, 2014 5:53 pm
by epyonxero » Fri Jan 17, 2014 5:53 pm
- Attachments
-
 Prior-optimising_performance.pdf
Prior-optimising_performance.pdf- Optimizing Coaxial Rotor Performance
- (386.97 KiB) Downloaded 1982 times
-
- nasa-tp-3675.pdf
- Nasa Survey on Coaxial Rotor Research
- (857.22 KiB) Downloaded 2222 times
- epyonxero
- Posts: 193
- Joined: Thu Aug 30, 2012 4:09 pm
17 posts
• Page 1 of 2 • 1, 2
Who is online
Users browsing this forum: No registered users and 26 guests