Did I get you right: you only did a static calibration? No Calibso?
something is going wrong with my AQ / settings
24 posts
• Page 2 of 3 • 1, 2, 3
Re: something is going wrong with my AQ / settings
![]() by teramax » Wed Oct 24, 2012 5:26 pm
by teramax » Wed Oct 24, 2012 5:26 pm
somehow everything can fly
- teramax
- Posts: 500
- Joined: Sun Sep 02, 2012 11:19 pm
- Location: Lower Austria
Re: something is going wrong with my AQ / settings
![]() by kinderkram » Wed Oct 24, 2012 5:57 pm
by kinderkram » Wed Oct 24, 2012 5:57 pm
Flies very smooth!
Did I get you right: you only did a static calibration? No Calibso?
Did I get you right: you only did a static calibration? No Calibso?
- kinderkram
- Posts: 2911
- Joined: Fri Jun 22, 2012 7:47 am
Re: something is going wrong with my AQ / settings
![]() by chschmid » Wed Oct 24, 2012 6:01 pm
by chschmid » Wed Oct 24, 2012 6:01 pm
Unbelievable, with no dance...
- chschmid
- Posts: 1800
- Joined: Wed Jul 11, 2012 7:41 pm
- Location: Herrliberg, Switzerland
Re: something is going wrong with my AQ / settings
![]() by epyonxero » Wed Oct 24, 2012 9:46 pm
by epyonxero » Wed Oct 24, 2012 9:46 pm
All of the really stable videos seem to be quads from what I can tell. My Y6 flys pretty well in manual mode but I havent been able to get it that steady in position hold.
- epyonxero
- Posts: 193
- Joined: Thu Aug 30, 2012 4:09 pm
Re: something is going wrong with my AQ / settings
![]() by Max » Wed Oct 24, 2012 9:58 pm
by Max » Wed Oct 24, 2012 9:58 pm
I had great "beginners luck" with my Y6 (flew great with default PIDs: http://vimeo.com/maximp/y6-aq66r19-flight4) until I tried upgrading the motors...  I guess that serves me right for messing with it! At any rate, I don't think it's an AQ "thing" or problem, just the more complex a setup, the more possible issues there will be. I'm thinking the coax setups especially are even more prone to vibrations than, say, a flat hexa.
I guess that serves me right for messing with it! At any rate, I don't think it's an AQ "thing" or problem, just the more complex a setup, the more possible issues there will be. I'm thinking the coax setups especially are even more prone to vibrations than, say, a flat hexa.
Marcus, that's a nice flying quad! The rubber chicken cargo was pretty funny... was wondering if you'd tease the dog with that some more.
-Max
Marcus, that's a nice flying quad! The rubber chicken cargo was pretty funny... was wondering if you'd tease the dog with that some more.
-Max
- Max
- Posts: 2814
- Joined: Mon Aug 13, 2012 9:45 pm
- Location: Near Ithaca, NY, USA
Re: something is going wrong with my AQ / settings
![]() by teramax » Thu Oct 25, 2012 6:34 am
by teramax » Thu Oct 25, 2012 6:34 am
somehow everything can fly
- teramax
- Posts: 500
- Joined: Sun Sep 02, 2012 11:19 pm
- Location: Lower Austria
Re: something is going wrong with my AQ / settings
![]() by epyonxero » Mon Oct 29, 2012 9:11 pm
by epyonxero » Mon Oct 29, 2012 9:11 pm
- epyonxero
- Posts: 193
- Joined: Thu Aug 30, 2012 4:09 pm
Re: something is going wrong with my AQ / settings
![]() by teramax » Mon Oct 29, 2012 9:37 pm
by teramax » Mon Oct 29, 2012 9:37 pm
Finaly my second AQ board arrived and i start freezing tomorrow. It is for a light GoPro Hexa + with Roxxy 2827-35 and 10x5 eProps AUW 2600g.
Till now this Hex flies great with the Naza and no vibrations so coud be the optimal platform for the AQ.
Looking foreward.......
Till now this Hex flies great with the Naza and no vibrations so coud be the optimal platform for the AQ.
Looking foreward.......
somehow everything can fly
- teramax
- Posts: 500
- Joined: Sun Sep 02, 2012 11:19 pm
- Location: Lower Austria
Re: something is going wrong with my AQ / settings
![]() by teramax » Fri Nov 02, 2012 9:45 pm
by teramax » Fri Nov 02, 2012 9:45 pm
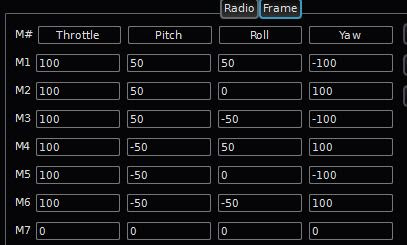
so i finished my second AQ build, it´s a Hex+, AUW 2600g, Roxxy 2827/35, eProp 10x5, 4s2600, Flyduino Carbonframe, RcTimer 30A ESC /SimonK flashed, Spektrum reciever.

First of all i forgot to set trottle value for 2 motors and one for roll in the mixingtable, second i forgot sponge on the baro but thats not the point, it flyes awsome. Of course fixed that for the log postet in this post!
PID all like they come in the r37 and yes i can not compile so i use r37 for AQ v1 at a AQ v2 board. Not long flighttimes, you are right but thats also not the point. Remember: it flyes awsome!
but thats also not the point. Remember: it flyes awsome!
So what´s the point: it fliew horrible with the motor_mixing_table i took from the Wiki, jumped up´n down, loud, horrible motornoise, and no altitude holding (at ph and also not in manual).
I went back to the motor_mixing theory which made my AQ Quad fly so wow and decidet to do something like that.
It is now dark so no flightvideo.

thats how a log should look a like, thought.
remember: it flyes ..........
So please someone more inteligent than me tell me what i stumbled into?
Marcus
First of all i forgot to set trottle value for 2 motors and one for roll in the mixingtable, second i forgot sponge on the baro but thats not the point, it flyes awsome. Of course fixed that for the log postet in this post!
PID all like they come in the r37 and yes i can not compile so i use r37 for AQ v1 at a AQ v2 board. Not long flighttimes, you are right
So what´s the point: it fliew horrible with the motor_mixing_table i took from the Wiki, jumped up´n down, loud, horrible motornoise, and no altitude holding (at ph and also not in manual).
I went back to the motor_mixing theory which made my AQ Quad fly so wow and decidet to do something like that.
It is now dark so no flightvideo.
thats how a log should look a like, thought.
remember: it flyes ..........
So please someone more inteligent than me tell me what i stumbled into?
Marcus
Last edited by teramax on Fri Nov 02, 2012 11:04 pm, edited 1 time in total.
somehow everything can fly
- teramax
- Posts: 500
- Joined: Sun Sep 02, 2012 11:19 pm
- Location: Lower Austria
Re: something is going wrong with my AQ / settings
![]() by sandmen » Fri Nov 02, 2012 10:41 pm
by sandmen » Fri Nov 02, 2012 10:41 pm
Marcus,
is M1 front left?
Can you add this information? Which port -> motor !
Thanks
is M1 front left?
Can you add this information? Which port -> motor !
Thanks
- sandmen
- Posts: 997
- Joined: Fri Jun 22, 2012 7:25 am
24 posts
• Page 2 of 3 • 1, 2, 3
Who is online
Users browsing this forum: No registered users and 4 guests