The last 2 month i spend with silent reading and following this place but now i am stuck with my AQ.
I have a very stable (roll/nick/yaw) well balanced Hexa X, Frame is F550 clone, Motors MT 2216/900 (balanced),
ESC first ESC32 than DYS 40A SinonK (calibrated extra once more before this flight)
Props running either 10x5 or 9x5 Graupner eProps (balanzed) and battery is 4s8000 Zippy.
AUW meanwhile 2180g.
AQ FW.: Version v6.6 r33
RC: Spektrum

I kicked out the WKM and made place for the AQ but all tuning and troubleshooting does not make this rig stable hover. Not in manual and also not in GPS/PH mode.
RTH and PH works unbelievable
Heres a short video of bumping "ignore the crazy dog
Motors are:Thr./Pitch/Roll/Yaw
0-front left 100/100/100/-100
1-left 100/0/75/100
2-rear left 100/-100/100/-100
3-front right 100/100/-100/100
4-right 100/0/-75/-100
5-rear right 100/-100/-100/100
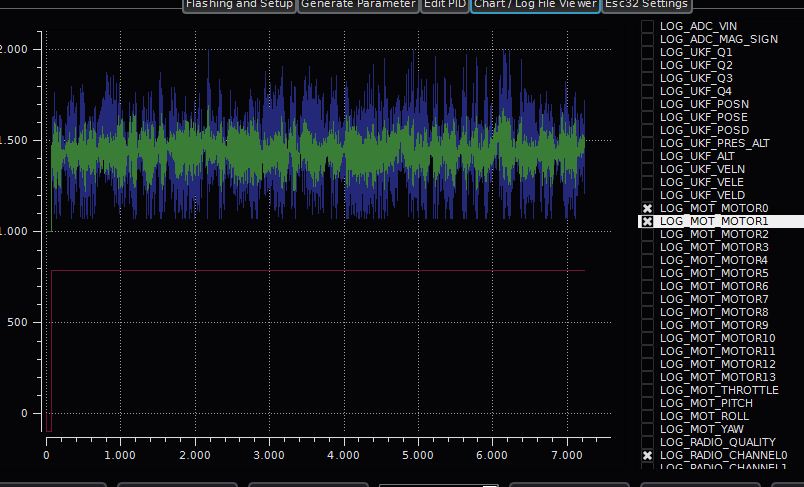
1. When i look at the LOG_MOT_MOTOR0 compared to LOG_MOT_MOTOR1 i wonder why the both (left and right) motors do at a stable hover (rig balanced) less than the oters.
So it puzzles me that something basic is going wrong here.
Log of this flight is uploaded here:
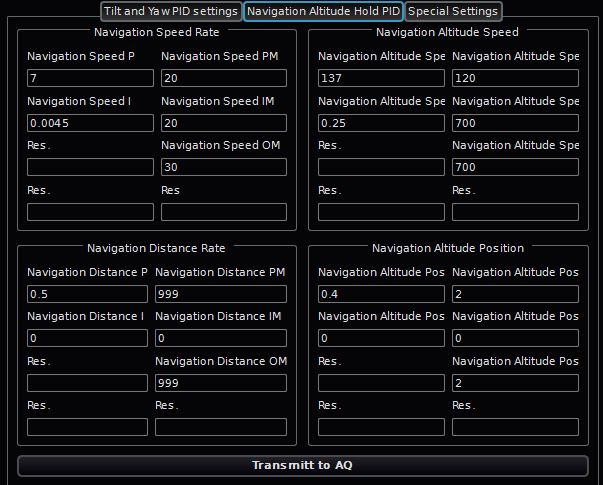
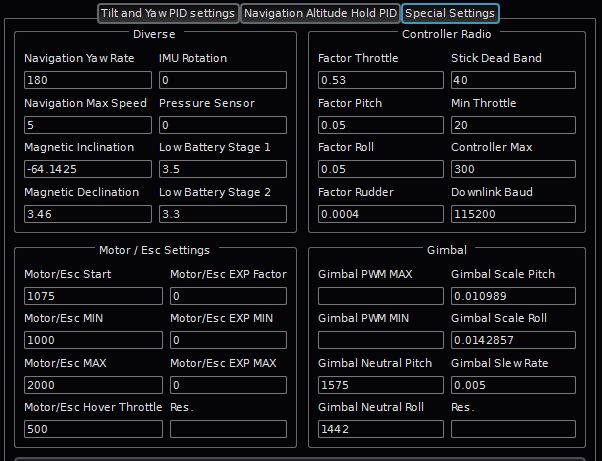
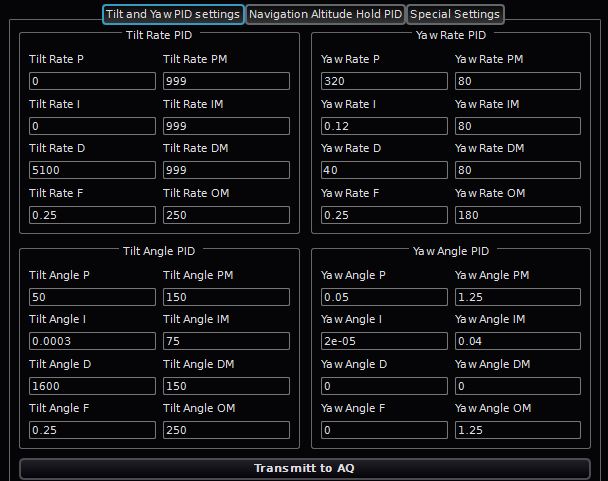
Screenshots from current settings can be found here:
Thanks for attention
Marcus