1. My actual hover point is ~1400 microseconds (just below mid stick). About where ecalc predicted.
2. When I briefly switched from Manual to Position Hold near the end of the flight, that's when the YoYo'ing started. The motors appear to be clipping, though that's not the reason for the yoyo's. I have not changed Motor Hover Throttle or Deadband so it may have been trying to perform a Vertical Override descent based on the throttle stick position. Seems to be the case as looking at the altitude logs, the overall tendency within the yoyo hash is a linear altitude loss.
I still need to tune Altitude Hold and other PIDs - have not had a chance to make another flight yet since the maiden
Screenshot shows the PWM output to the 4 motors. My RC Throttle stick position and Flap switch position.
Looking through the wiki in the Attitude Tuning section has gotten me confused. It says:
---8<---
Rate limits
The attitude rate PID generates required PWM width (in microseconds) to control the motors in order to achieve stability. PM, IM and DM limits the output of each PID term so that it doesn’t burn the motors or saturate the system. The OM parameter defines the maximum output from the rate controller, thus no matter how much you set the PID limits, the output won’t exceed OM value.
...
Attitude Angle PID
...
Again, the output of this stage is R/C PWM pulse lengths measured in microseconds. The output of this PID is mathematically added to the output of the inner rate PID and both are sent to the motors and added with the current throttle setting at each time step.
---8<---
My understanding from the above is, the processing order of PID loops is NAV->Angle->Attitude-> ESCs->Motors
Tilt Rate P/I/D/OM and Tilt Angle P/I/D/OM values have units of microseconds.
So for example, based on the values in the first graphic in that wiki section...
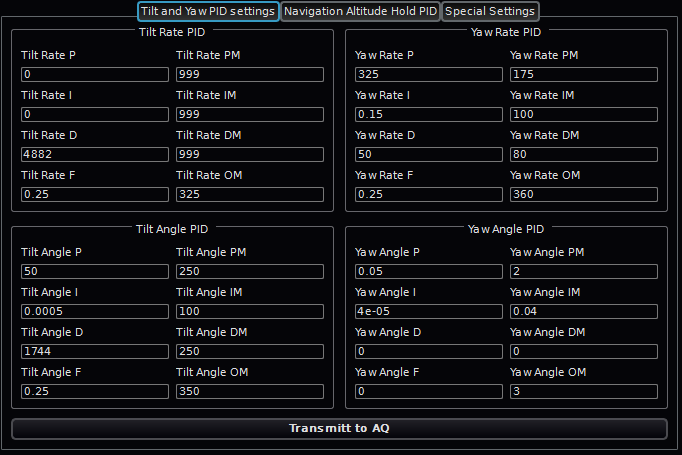
The maximum PWM sent to the ESC's will not exceed:
325 (Tilt Rate OM) + 350 (Tilt Angle OM) + current throttle setting (RC throttle or some other internal throttle value)?
Also in the graphic, the values of Tilt Rate P/I/DM are 999 while OM is 325. So OM of 325 overrides the 999?
And where or if the Yaw Rate/Angle P/I/D/OM values figure into the above?
I would like to understand the relationships and what combination will lead to motor output saturation. And is that always a bad thing under any condition.
Thanks.