The pin layout is on the wiki page:
http://autoquad.org/wiki/wiki/m4-microc ... onnection/
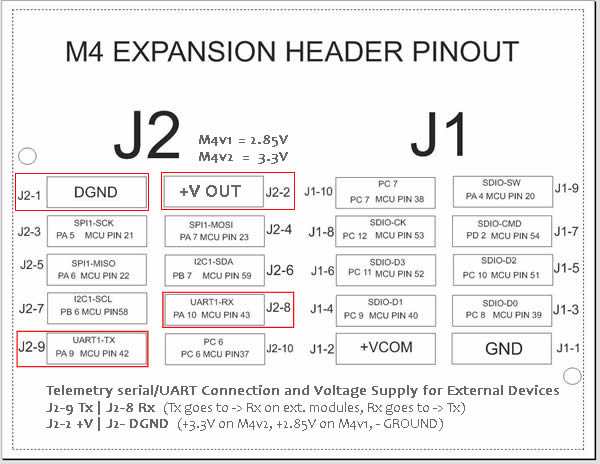
Basically for hott com 1: you need pin J2-9 (HoTT is using half duplex TX line only) or for com 3: pin J2-10.
Please note that in most default cases pin J2-10 (PC6) is mapped for using on a PWM line for external esc's.
In the case of using a bluetooth module AND HoTT telemetry you need a remapped FW, I use that obviously
Resistors are always a good idea, I have a 100ohm in line.
I made this tiny board that only holds com1 and 3 for direct attach of the HoTT receiver. Working great in small frames like the ladybird.
- m4comp.png (9.06 KiB) Viewed 28132 times