Hi,
i have a little problem when i fly in manual mode, the copter goes to right and back and i must always correct with roll and pitch stick from my futaba. I see that in ground control when the quadcopter is on ground the horizon line is perfect levelled but i want to see if i get some kind of interference when fly. So the question is where i can see the horizon from the log file? I redo 2 times the calibration procedure, static and dynamic (calibso dance 8 minutes) and it fly very well with the last firmware and in gps with mission, all is perfect but not when in manual.
Any suggestion?
thanks
this is my last log https://docs.google.com/file/d/0Bwbzwdx ... sp=sharing
See horizon level on log file
2 posts
• Page 1 of 1
 See horizon level on log file
See horizon level on log file
![]() by codeforge » Fri Feb 15, 2013 1:22 pm
by codeforge » Fri Feb 15, 2013 1:22 pm
- codeforge
- Posts: 104
- Joined: Tue Jul 31, 2012 11:09 pm
Re: See horizon level on log file
![]() by mr_westie » Wed Jun 12, 2013 11:05 pm
by mr_westie » Wed Jun 12, 2013 11:05 pm
My guess is it would be a fusion of ACC and MAG sensors.
Or just plain ACC X/Y
Just as a reference here is what various attitudes look like for the sensors.
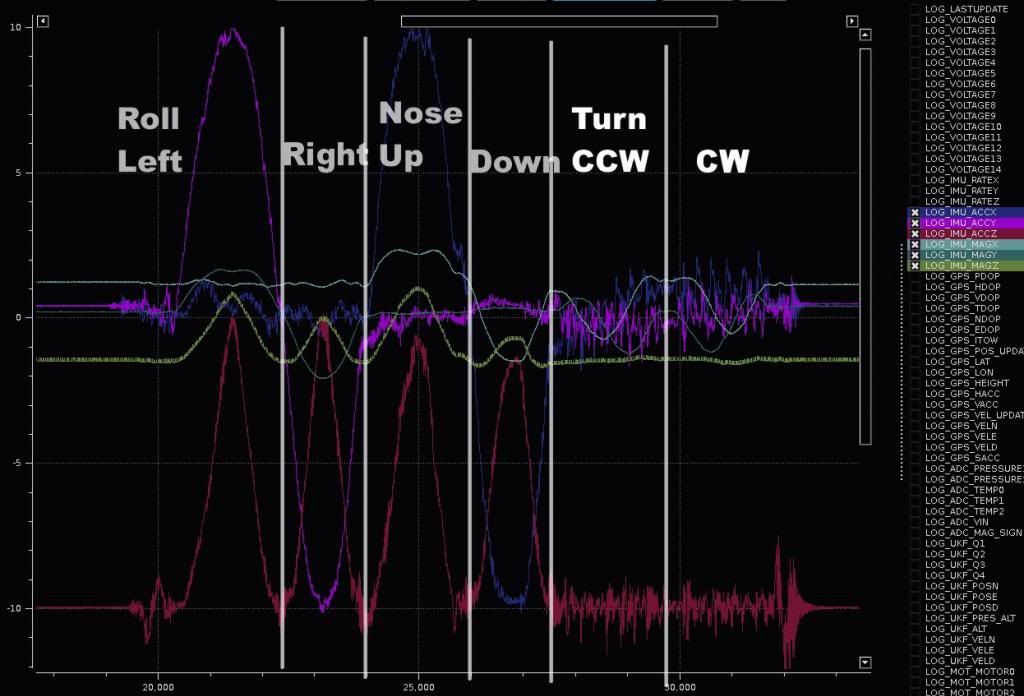
Level the X/Y should be zero.
Of course the more vibration the harder the system will have estimating level.
Your vibs look ok, ACC X/Y +-0.5 , RATE +-0.5
I can see your ACCY is slightly off. Which might not be easy to see on the GCS Artifical Horizon.
Might have to use spacers to level the board or trim it out on the radio.
Or just plain ACC X/Y
Just as a reference here is what various attitudes look like for the sensors.
Level the X/Y should be zero.
Of course the more vibration the harder the system will have estimating level.
Your vibs look ok, ACC X/Y +-0.5 , RATE +-0.5
I can see your ACCY is slightly off. Which might not be easy to see on the GCS Artifical Horizon.
Might have to use spacers to level the board or trim it out on the radio.
- mr_westie
- Posts: 149
- Joined: Mon Oct 08, 2012 1:23 am
2 posts
• Page 1 of 1
Return to AutoQuad 6 Flight Controller
Who is online
Users browsing this forum: No registered users and 79 guests