I've been reading a bit around and still trying to get my head around how these calibrations work, but still don't get it.
Could some be so kind to explain how the currentlimit and rpmtovoltage works with simple words and how they releate to each other? And what the CLxTERM and FF1TERM parameters really means
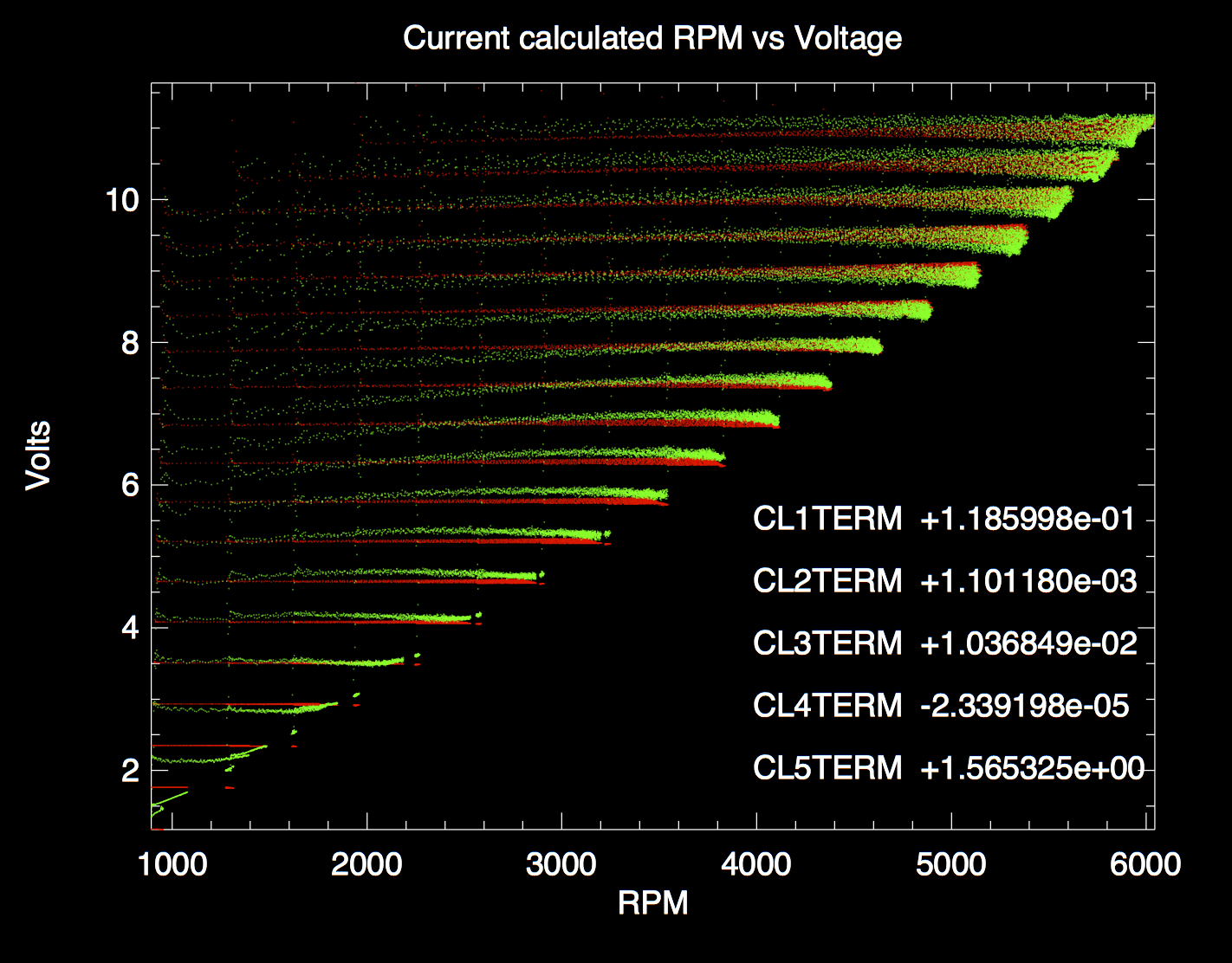
and how do you read this graph?
is duty cycle = throttle in simple terms?
for optimal results is it best calibrate every engine and prop (on the same copter) or is the difference so small that its not worth the time?
and last question will the Autoquad FC work with closed loop RPM mode on the ESC32s? I cant find any info about this, but most pppl here seems to be using RPM mode on their ESC32s?
thanks